



Non si sale veloci celebrando i risultati quanto superando le disillusioni
MICROPROCESSORI E MICROCONTROLLORI
… studiare, studiare ed ancora studiare,
è il solo modo di capire quanto possa
essere grande sia la propria ignoranza!
I MICROCONTROLLORI 8051 E PIC16F84A





Il microcontrollore 8051 è uno dei single chip più diffusi.
Prodotto all’inizio degli anni 80 inizialmente dall’Intel, oggi è
implementato in centinaia di versioni anche da altri produttori.
Il micro è costituito dai seguenti componenti:
•
core a 8 bit ottimizzato per applicazioni di controllo;
•
Internal RAM da 128 byte dedicata ai dati;
•
Internal ROM da 4 Kbyte dedicati al programma;
•
External RAM:
– da 64 Kbyte indirizzabile per i dati;
– da 64 Kbyte indirizzabile per i programmi;
•
32 linee di I/O bidirezionali digitali indirizzabili separatamente;
•
2 timer/contatori a 16 bit;
•
porta seriale full-duplex;
•
5 linee di interrupt di cui 2 esterne, ciascuna con 2 livelli
di priorità;
•
generatore di clock interno;
•
eventuali convertitori ADC e DAC implementati da alcuni
costruttori, conservando però la compatibilità.
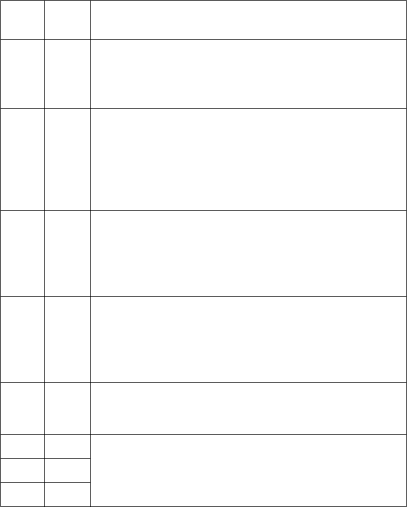
Nella sottostante figura è illustrata la connessione tra il core e i componenti accessori.
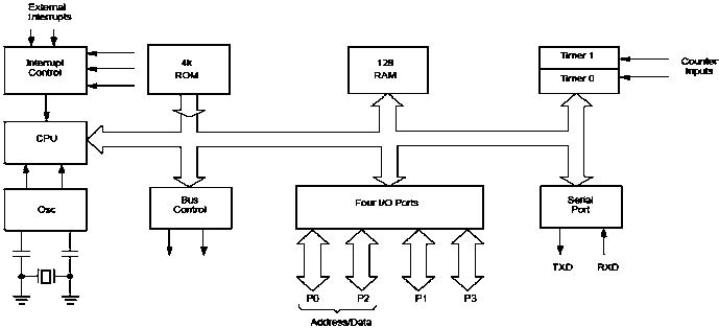
Schema a blocchi del microcontrollore 80C51

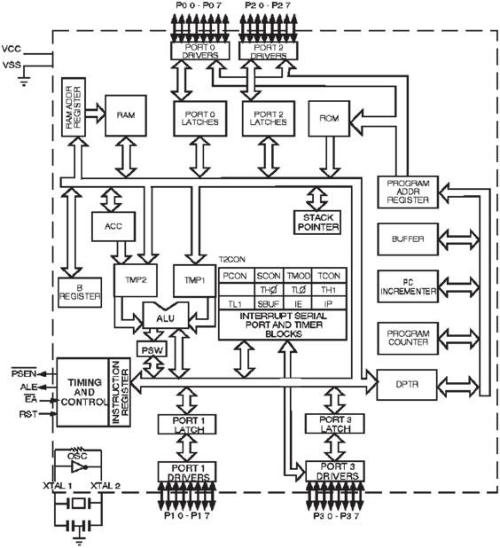
Architettura interna del microcontrollore 80C51 ed il suo Pin-Out
Architettura interna
L’architettura interna dell’8051 (sopre raffigurata) è di tipo Harvard con spazio e bus
separati per dati e programma.
La memoria è di tre tipi:
•
memoria interna (On-Chip);
•
memoria esterna di programma
(External Code);
•
memoria esterna di dati (External RAM).
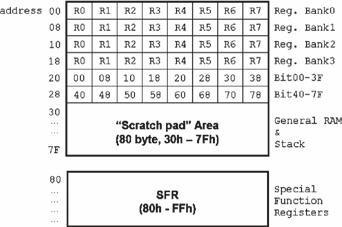
La memoria interna si compone di 2 parti (vedi figura
a lato):
•
RAM interna che a sua volta si divide in:
– un banco di registri 0 (00H-07H) e i banchi 1, 2
e 3 (08H-1FH) che possono essere utilizzati tramite
SFR;
– una memoria a bit (20H-2FH);
– memoria utente e area stack, 80 byte (30H-7FH)
memoria SFR (Special Function Registers).
Se si accede alla memoria con il metodo dell’indirizzamento diretto, nel codice
dell’istruzione è necessario specificare gli indirizzi:
•
da 00H a 7FH per la memoria interna;
•
da 80H a FFH per gli SFR
I registri
I registri sono utilizzati come memoria temporanea e per trasferire dati da una locazione di
memoria ad un’altra.
Il banco di registri 0 viene richiamato nelle istruzioni per default.
Infatti ADD A, R4 somma il contenuto del registro R4 del banco 0, quindi con indirizzo 04H,
con l’accumulatore e pone il risultato nell’accumulatore stesso.
Se si desidera utilizzare il registro R4 di un altro banco (ad esempio il primo) è necessario
specificare nell’istruzione l’indirizzo relativo, in questo caso 0CH): ADD A,0C.
La memoria a bit (bit mapped), alla quale si accede con gli indirizzi da 20H a 2FH, è
gestibile bit a bit con istruzioni particolari quali SETB e CLR.
Esempio
Scrivere le istruzioni per settare il bit 25H e resettare il bit 26H.
Per settare il bit 25H il comando è SETB 25.
Per resettare il bit 26H il comando è: CLR 26.
La memoria (utente e stack) è utilizzata sia per memorizzare in modo veloce e frequente
le variabili del codice utente sia per l’area stack.
Questa memoria conta soli 80 byte quindi la parte riservata per lo stack è limitata.
I registri speciali (SFR), indirizzati in modo diretto così che è sempre possibile prelevare
il giusto dato, servono per le seguenti funzioni:
•
accesso per lettura e scrittura sulla porta seriale e relativa impostazione del baud rate;
•
accesso alle linee di I/O;
•
accesso ai due timer;
•
configurazione degli interrupt.
L’area dei registri SFR non può essere utilizzata come RAM addizionale, salvo eccezioni.
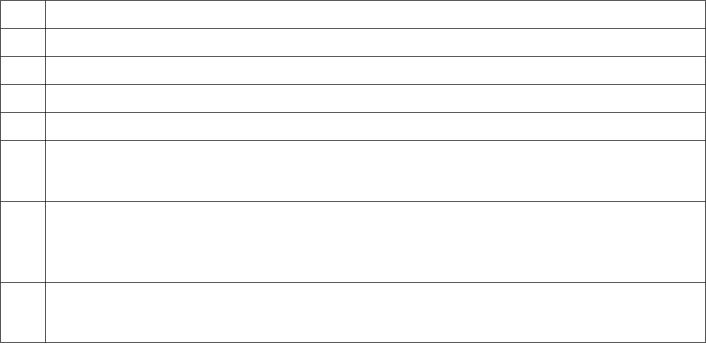
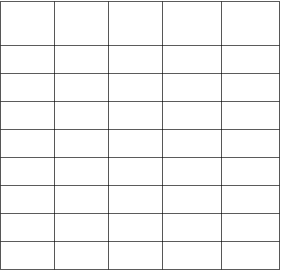
I registri SFR possono esser suddivisi in 3 categorie (vedi la sottostante tabella):
– per task generici (A, B, DPTR, PC, SP, SBUF, TL0/TH0, TL1/TH1);
– di controllo (PSW, PCON, TCON, TMOD, SCON, IE, IP);
– per le porte di I/O (P0, P1, P2, P3).
L’accumulatore, indicato con A nelle istruzioni, è un registro a 8 bit individuato dall’indirizzo
E0H.
È utilizzato dalla metà delle 255 istruzioni.
Il registro B, appartenente agli SFR, è un registro a 8 bit residente all’indirizzo F0H.
È usato dalle istruzioni:
• MUL AB;
• DIV AB;
Banco di registri SFR.

Indirizzi
Registri
Indirizzi
80
PO
SP
DPL
DPH
PCON
87
88
TCON
TMOD
TLO
TL1
TH0
TH1
8F
90
P1
97
98
SCON
SBUF
9F
A0
P2
A7
A8
IE
AF
B0
P3
B7
B8
IP
BF
C0
C7
C8
CF
D0
PSW
D7
D8
DF
E0
Acc
E7
E8
EF
F0
B
F7
F8
FF
per contenere il secondo operando nelle operazioni di moltiplicazione e divisione e
come nono registro associato al banco dei registri R.
Il registro DPTR (Data PoinTer Register) è un puntatore dati, quindi ha un formato a 16 bit.
È ottenuto da due registri a 8 bit DPL e DPH con indirizzi rispettivamente 82H e 83H.
Può essere utilizzato dal codice per memorizzare dati a 2 byte.
Il registro PC (Program Counter) è a 16 bit.
Al bootstrap è inizializzato con 0000H.
Il PC non è accessibile direttamente dal codice.
Il registro SP (Stack Pointer) è a 8 bit quindi può indirizzare un’area stack da 256 byte.
È residente all’indirizzo 81H e il suo contenuto in fase di inizializzazione è 07H.
Il suo contenuto viene modificato con le istruzioni PUSH, POP, ACALL, LCALL, RET, RETI e
da tutte le operazioni di interrupt.
Il registro SBUF (Serial BUFfer), residente all’indirizzo 99H, è usato per inviare e ricevere i
dati dalla porta seriale.
Se si scrive un dato nel registro SBUF, questo viene inviato sulla porta seriale dal pin TXD.
Analogamente ogni dato ricevuto dalla seriale attraverso il pin RXD viene reso disponibile al
programma utente mediante una lettura nel registro SBUF.
I registri TL0/TH0, entrambi a 8 bit e quindi in modo congiunto a 16 bit, residenti agli
indirizzi 8AH/8BH, contengono lo stato del timer 0 che è configurato da TMOD.
Generalmente i timer funzionano sempre in modo ascendente.
I registri TL1/TH1, entrambi a 8 bit e quindi in modo congiunto a 16 bit, residenti agli
indirizzi 8AH/8BH, contengono lo stato del timer 1 che è configurato da TMOD.
Generalmente i timer funzionano sempre in modo ascendente.
Il registro PSW (Program Status Word), indirizzo D0H e indirizzabile a bit, contiene:
•
CY (PSW.7) CarrY flag;
•
• AC (PSW.6) Auxiliary Carry;
•
F0 (PSW.5) Flag utilizzabile dall’utente;
•
RS1 (PSW.4) bit 1 di selezione del banco di registri;
•
RS0 (PSW.3) bit 0 di selezione del banco di registri, insieme a RS1 seleziona il banco di
registri R secondo la sotostante tavola Selezione dei Registri RS
•
OV (PSW.2) OVerflow;
•
- (PSW.1) flag definibile dall’utente;
•
P (PSW.0) Parity flag, flag di parità pari.
Il registro PCON (Power CONtrol), indirizzo 87H, è utilizzato per:
•
controllare il power mode del micro;
•
consentire il passaggio nello stato sleep che richiede minore potenza;
•
permettere, con il set di un bit, di raddoppiare il baud rate effettivo della porta seriale.
Il registro TCON (Timer CONtrol), indirizzo 88H e indirizzabile a bit, serve a:
•
configurare e modificare il funzionamento dei timer;
•
indicare con un bit l’overflow del timer;
•
configurare gli interrupt esterni;
•
segnalare l’attivazione di un interrupt esterno.
Il registro TMOD (Timer MODe), indirizzo 89H, serve a programmare il funzionamento dei
2 timer come:
•
2 timer separati;
•
un unico timer da 16 bit;
•
un unico timer da 13 bit;
•
un timer a 8 bit con autocaricamento;
•
un timer come contatore se è attivato un bit dall’esterno;
•
un timer come contatore di eventi se è attivato un bit dall’esterno.
Il registro SCON (Serial Control), indirizzabile a bit all’indirizzo 98H, serve a configurare il
funzionamento della porta seriale, ne abilita la ricezione e programma il baud rate.
Alcuni flag segnalano l’avvenuta ricezione o trasmissione con successo del dato.
Il registro IE (Interrupt Enable), indirizzo A8H, serve ad abilitare e disabilitare gli interrupt.
Il bit più significativo, che è prioritario rispetto a tutti gli altri bit, abilita e disabilita tutti i
segnali di interrupt.
I 7 bit meno significativi abitano e disabilitano gli interrupt individualmente.
Il registro IP (Interrupt Priority), indirizzo B8H, è un registro che consente di stabilire
la priorità tra gli interrupt.
Un interrupt con priorità più bassa (0) non può interrompere un interrupt con priorità
più elevata (1).
P0 (porta 0), P1 (porta 1), P2 (porta 2) e P3 (porta 3) con indirizzi rispettivamente 80H,
90H, A0H e B0H, sono porte a 8 bit di input/output.
Ciascun bit di ogni porta corrisponde a un pin dell’integrato.
I pin della P0 vanno da P0.0 a P0.7 e così per le altre porte.
Ogni pin può essere forzato a livello alto o basso.
Se il micro ha una memoria esterna, P0 e P2 sono adibite esclusivamente alla gestione
degli indirizzi della memoria.
Memoria esterna di programma
La memoria esterna è di solito ROM, EPROM o FLASH e contiene il programma utente da
eseguire.
Sono possibili due soluzioni:
•
EA = 1, la memoria programma è formata da 4 KB interni e i restanti 60 KB esterni;
•
EA = 0, la memoria programma 64 KB è tutta esterna.
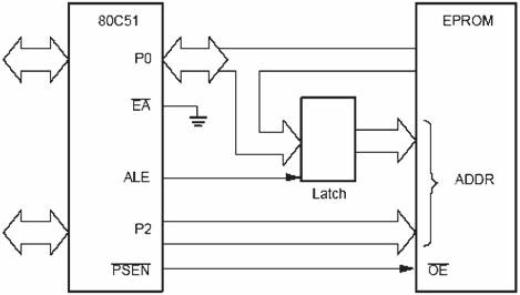
Nella sottostante figura è riportato lo schema di interfacciamento tra il micro e una EPROM.
I segnali per la gestione dell’interfacciamento sono i seguenti:
• P2.0-P2.7 è la parte alta dell’indirizzo;
• la porta P0 trasmette la parte bassa dell’indirizzo al
Latch per essere libera di ricevere il dato dalla EPROM;
• P0.0-P0.7 è la parte bassa dell’indirizzo;
• P0.0-P0.7 è il dato trasmesso dalla EPROM al micro;
• PSEN abilita la EPROM alla trasmissione del dato.
Selezione dei registri RS.


RS1
RS0
Banco di registri R
Indirizzi
0
0
0
00H-07H
0
1
1
08H-0FH
1
0
2
10H-17H
1
1
3
18H-1FH
RAM esterna
La RAM esterna, normalmente statica o FLASH, può avere una dimensione massima di
64 KB, mentre la RAM interna è di 128 byte.
La RAM interna è più veloce mentre quella esterna è molto più lenta.
Ad esempio incrementare una variabile interna necessita di un ciclo di istruzione mentre la
stessa operazione nella memoria esterna necessita di 7 cicli di istruzione.
Nella sottostante figura è riportato lo schema di interfacciamento tra il micro e la
RAM esterna.
I segnali per la gestione dell’interfacciamento sono i seguenti:
• P2.0-P2.7 è la parte alta dell’indirizzo;
• la porta P0 trasmette la parte bassa dell’indirizzo al
Latch per essere libera di ricevere il dato dalla EPROM;
• P0.0-P0.7 è la parte bassa dell’indirizzo;
• P0.0-P0.7 è il dato trasmesso dalla EPROM al micro
Interfacciamento del microcontrollore 80C51 con una EPROM
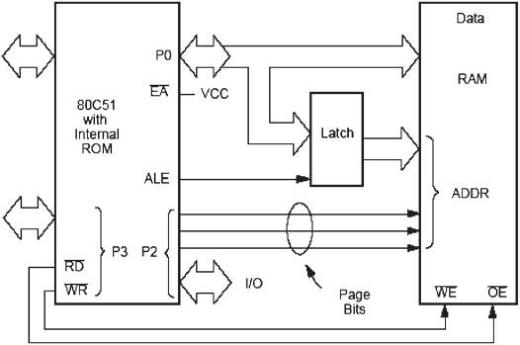
Interfacciamento del microcontrollore 80C51con una RAM
• P3.6 abilitazione alla scrittura;
• P3.7 abilitazione alla lettura.
Modalità di indirizzamento
Le modalità di indirizzamento sono le seguenti:
• indirizzamento immediato;
• indirizzamento diretto;
• indirizzamento indiretto;
• esterno diretto;
• esterno indiretto.
Indirizzamento immediato.
In questo modo di indirizzamento l’operando è dato immediatamente nel codice operativo
dell’istruzione.
Il dato è una costante e non può essere un indirizzo.
Il metodo è veloce ma non ha alcuna flessibilità (hard-coded).
Esempio
MOV A,#30H
;nell’accumulatore viene caricato il dato esadecimale 30
Indirizzamento diretto.
Nell’istruzione viene specificato l’indirizzo di memoria dove si trova l’operando.
È un metodo valido solo per la memoria interna.
Se l’operando si trova nella memoria esterna si deve usare l’indirizzamento indiretto.
L’indirizzamento è flessibile e veloce poiché il dato è comunque nella memoria interna.
Esempio
MOV A,10H
;l’accumulatore A è caricato con il contenuto della locazione di memoria
;il cui indirizzo è 10H
Indirizzamento indiretto.
Nell’istruzione viene indicato il registro nel quale si trova l’indirizzo di memoria dove
prelevare l’operando.
Il metodo è estremamente flessibile poiché consente di prelevare un operando sia dalla
memoria interna sia da quella esterna.
Non è possibile utilizzare questo metodo per prelevare dati da SFR, non è utilizzabile per
scrivere in una porta seriale.
I registri contenenti gli indirizzi a 8 bit possono essere R0 e R1 mentre l’unico registro che
può contenere un indirizzo a 16 bit è il DPTR.
Esempio
MOV A, @R0
;nell’accumulatore viene caricato il dato presente in memoria all’indirizzo
;contenuto nel registro R0
Indirizzamento esterno diretto.
È il modo di indirizzamento per caricare la memoria esterna.
Sono solo due le istruzioni che utilizzano questo metodo:
MOVA A, DPTR
MOVX @DPTR,A
Nella prima istruzione il dato che si trova in memoria all’indirizzo specificato dal registro
DPTR deve essere memorizzato nell’accumulatore.
Nella seconda istruzione il contenuto dell’accumulatore viene caricato in memoria all’indirizzo
contenuto dal registro DPTR.
Indirizzamento esterno indiretto.
È un modo usato per indirizzare la memoria esterna.
Esempio
MOV @R0, A
Il dato presente nell’accumulatore viene inviato in memoria all’indirizzo contenuto in R0.
Poiché R0 è un registro a 8 bit, è possibile indirizzare solo 256 byte della memoria esterna.
Indirizzamento implicito.
Nell’istruzione sono specificati i registri ai quali si farà l’accesso.
Esempio
DIV AB
Porta seriale
La porta seriale consente la comunicazione full duplex.
Il dato da trasmettere o da ricevere viene posto nel registro SBUF.
La segnalazione dell’avvenuta ricezione o trasmissione corretta dell’informazione è segnalata
dallo stesso registro.
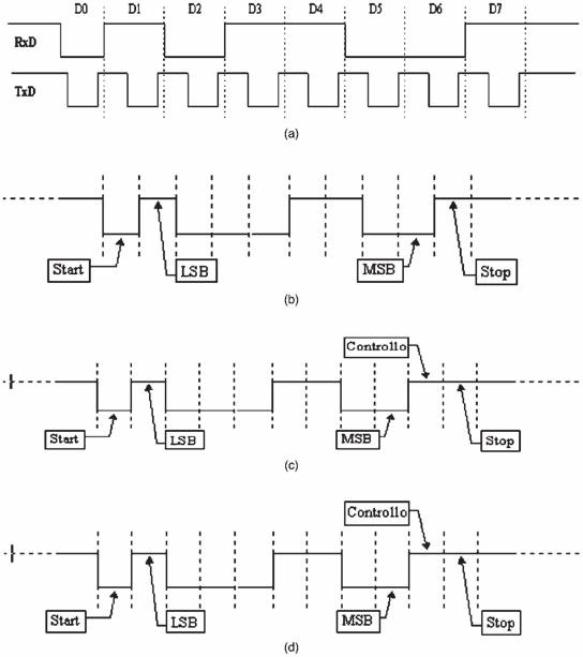
Nelle soprastanti tabelle sono riportate le configurazioni della porta seriale, che può operare
in 4 modi:
•
modo 0; i dati a 8 bit sono trasferiti in modo seriale tramite il pin RXD.
Da TXD viene emesso il clock generato dal registro a scorrimento; la velocità in baud è
1/12 della frequenza dell’oscillatore;
nella sottostante figura (a) è illustrato il diagramma temporale;
•
modo 1; è una comunicazione a 10 bit (bit di start + 8 bit del dato + bit di stop)
(figura b); la trasmissione avviene su TXD e la ricezione su RXD; in ricezione il bit di
stop è scritto su RB8 nel registro SCON; la velocità è variabile;
•
modo 2; è una comunicazione a 11 bit (un bit di start+8 bit di dato+un bit programma-
-bile dall’utente+un bit di stop); in figura ( c) vi è il diagramma temporale; la velocità è
programmabile a 1/32 o 1/64 della frequenza di oscillazione;
•
modo 3; come il modo 2 ma la velocità è data dal timer 1 (figura d)

SM0
Bit di modo 0 (NOTE 0)
SM1
Bit di modo 1 (NOTE 1)
SM2
Abilita la comunicazione multiprocessore in modo 2 e 3
REN
Set/Cleared via software per ricezione abilitata/disabilitata
TB8
Nono bit che sarà trasmesso in modo 2 e 3 - Set/Cleared via software
RB8
Nono bit che è stato ricevuto in modo 2 e 3
In modo 1 se SM2=0, RB8 è il bit di stop ricevuto
In modo 0 RB8 non è usato
TI
Flag di interrupt in trasmissione
Settato via hardware quando è stato trasmesso l’8º bit in modo 0 o all’inizio del bit di stop
negli altri modi
Deve essere cancellato via software
RI
Flag di interrupt in ricezione
Settato via hardware alla fine dell’8º bit in modo 0 o a metà del bit di stop negli altri modi
Deve essere settato via software
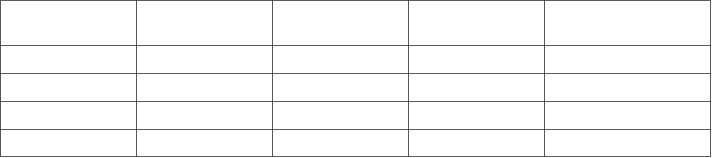
Registro SCON per la programmazione della porta seriale.


SM0
SM1
Mode
Description
Baud rate
0
0
0
Shift Register
Fosc/12
0
1
1
8-bit UART
Variable
1
0
2
9-bit UART
Fosc/64 or Fosc/32
1
1
3
9-bit UART
Variable
I timer/contatori
Il micro 8051 è dotato di 2 registri timer/contatori a 16 bit che svolgono le seguenti funzioni:
•
conteggiare il tempo tra due eventi
Funzionamento della porta seriale: in modo 0 (a), in modo 1 (b), in modo 2 (c), in modo 3 (d)
•
contare il numero di eventi;
•
generare il baud rate per la porta seriale.
Nel funzionamento come timer, il registro è incrementato a ogni ciclo macchina.
Poiché ogni ciclo macchina è formato da dodici colpi di clock, il conteggio progredisce ogni
dodicesimo impulso del clock.
Nel funzionamento come contaeventi, il registro viene incrementato ogni transizione
da 1 a 0 dell’ingresso T0 e T1.
La massima frequenza è 1/24 della frequenza di clock.
Nella sottostante tabella è riportata la configurazione e l’inizializzazione dei timer
Configurazione e inizializzazione dei timer.

SFR
Descrizione
Indirizzo SFR
TMOD
Timer Mode
89H
TCON
Timer Control
88H
TH1
Timer 1 byte basso
8BH
TH1
Timer 1 byte alto
8DH
TL0
Timer 0 byte basso
8AH
TH0
Timer 0 byte alto
8CH
Gli interrupt
Il micro 8051 è dotato di 5 sorgenti di interrupt:
• interrupt esterno 0;
• interrupt esterno 1;
• ricezione/trasmissione seriale;
• overflow timer 0;
• overflow timer 1.
Se sono stati abilitati gli interrupt, il micro sospende l’esecuzione del programma
principale ed esegue l’interrupt handler (subroutine) del dispositivo che ha richiesto
l’intervento.
Ogni sorgente di interruzione può essere programmata individualmente ad uno di due livelli
di priorità (alta o bassa) settando o azzerando un bit nel registro IP (SFR).
Se due interrupt dello stesso livello si presentano contemporaneamente, il micro esegue
una sequenza di polling assegnando la priorità
indicata nella tabella a lato.
Gli interrupt sono inizialmente tutti disabilitati.
Pertanto è compito del programmatore configurare
il registro IE (SFR), come nella sottostante tabella.
Priorità interna agli stessi livelli

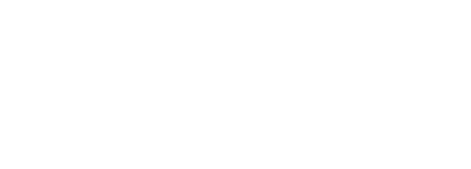
Priority
Within level
Source
Address
Highest
IE0
0003H
TF0
000BH
IE1
0013H
TF1
001BH
Lowest
RI+TI
0023H
Configurazion del registro IE


Bit
Symbol
Address
Function
IE.7
EA
AFH
Disabilita tutti gli interrupt
IE.6
--
AEH
Reserved
IE.5
--
ADH
Reserved
IE.4
ES
ACH
Abilita interrupt seriale
IE.3
ET1
ABH
Abilita interrupt timer 1
IE.2
EX1
AAH
Abilita interrupt esterno INT1
IE.1
ET0
A9H
Abilita interrupt timer 0
IE.0
EX0
A8H
Abilita interrupt esterno INT0
Il microcontrollore PIC 16F84A
L’architettura dei microcontrollori PIC (Peripherical Interface Controller) della Microchip si
basa su una CPU di tipo RISC, con separazione tra bus dati e bus istruzioni, quindi con
un’architettura di tipo Harvard.
Per quasi tutti i modelli di PIC l’unica area RAM utilizzabile è di fatto l’elevato numero di
registri interni, non avendo alcuna possibilità di indirizzare una memoria esterna.
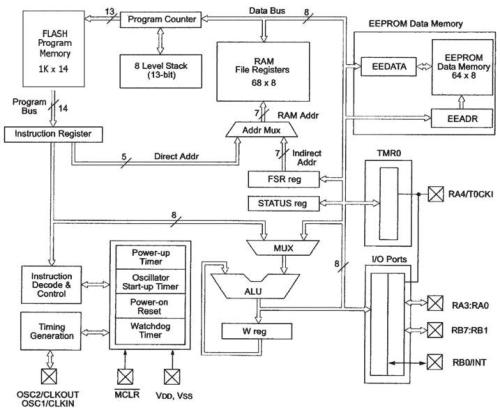
Il PIC16F84A, del quale, a lato
lo schema a blocchi, ha una
RAM interna con una dimen-
-sione da 512 a 2024 parole
di istruzioni.
La RAM interna, vista come un
insieme di registri a 8 bit, è
costituita da 80 fino a 248
registri, a seconda del modello
di PIC.
Oltre ai registri generali il
micro, con periferiche interne,
è dotato anche di registri
specializzati nei modelli.
La disponibilità di molti registri
rende molto veloce l’elabora-
-zione delle istruzioni e le
risposte alle interruzioni, ma
l’area stack è piuttosto ridotta,
da 2 a 16 livelli.
L’impossibilità di gestire una memoria esterna non limita la lunghezza del programma dato
che il codice macchina è piuttosto compatto, infatti il formato delle istruzioni va da 12 a
16 bit.
Il modello 17C42 è in grado di gestire una memoria esterna e quindi costituisce un’eccezione
della famiglia PIC.
La CPU interna,che può essere a 8 o a 16 bit, è semplice e molto veloce in quanto esegue le
istruzioni in un ciclo macchina.
I PIC non hanno la necessità di un clock molto elevato poiché le istruzioni sono semplici e
vengono eseguite molto velocemente.
La frequenza si aggira sui 4-8 MHz nelle versioni base, fino a 33-50 MHz nelle versioni di
fascia alta.
L’architettura Harvard ha un bus dati a 8 bit e un bus indirizzi a 12 o a 16 bit.
La programmazione si presenta abbastanza semplice sia per il limitato numero di istruzioni,
in genere non oltre 35, sia per la ortogonalità dei registri.
Le istruzioni aritmetiche e logiche possono avere come operandi due registri qualunque.
Con una modalità di indirizzamento indiretto vi è la possibilità di spostare i dati dalla
memoria programma alla memoria dati.
Nei modelli base non vi sono ingressi per gli interrupt, mentre nei modelli di fascia media e
alta ve ne sono diversi e alcuni anche collegati direttamente alle periferiche interne, come
per esempio il timer.
Il timer è sempre presente in tutte le versioni, le altre periferiche, quali il convertitore AD,
il PWM e la porta seriale, sono disponibili in alcuni modelli.
I PIC sono disponibili nelle versioni a basso consumo e con tensione di alimentazione ridotta
(2 V).
In generale i PIC sono componenti OTP ma vi sono anche alcune versioni che hanno una
EEPROM interna.
In base alla CPU si possono distinguere in micro a:
• 8 bit (serie PIC12, PIC16, PIC17, PIC18);
• 16 bit (serie PIC24 e PIC33).
Il PIC16F84A ha due caratteristiche importanti:
• l’abbondanza di registri;
• la presenza di porte di I/O in grado di pilotare carichi esterni.
Le periferiche di un PIC sono:
•
porte; sono le periferiche di base per comunicare da e verso l’esterno; devono essere
configurate dall’utente come uscite o ingressi;
•
memoria; normalmente di tipo FLASH, locazione dove vengono conservati i dati e il
programma anche in assenza di alimentazione;
•
ADC; è il convertitore che consente di trasformare un segnale d’ingresso analogico in
uno digitale a 10 bit;
•
timer; sono presenti in tutte le versioni dei PIC e servono per misurare intervalli di tempo
o contare eventi esterni;
• PWM; serve a generare un segnale di comando digitale di tipo PWM;
• comunicazioni; è la via di collegamento con protocolli standard con altri componenti.
Schema a blocchi e piedinatura
Il PIC16F84 è un micro a 8 bit e ha a disposizione 35 istruzioni tutte eseguite in un ciclo
tranne quelle di branch che necessitano di 2 cicli.
I modi di indirizzamento sono diretto, indiretto e relativo.
Il clock ha una frequenza di 20 MHz e ogni ciclo di istruzione dura 200 ns.
Tutti i registri sono a 8 bit e la memoria è organizzata in byte.
Le caratteristiche hardware del PIC16F84 sono le seguenti:
•
CPU a 8 bit;
•
memoria:
– FLASH 1 K × 14 bit per il codice;
– RAM da 68 byte per le variabili;
– 15 registri speciali;
– EEPROM da 64 byte per dati di configurazione e taratura;
– area stack a 8 livelli;13 pin di I/O ad alta corrente;
•
4 sorgenti di interrupt;
•
timer a 8 bit;
•
watchdog timer a 8 bit;
•
prescaler programmabile per i 2 timer;
•
modalità standby;
•
programmabilità in-circuit;
•
alimentazione da 2 V a 6 V;
•
clock massimo a 10 MHz.
In figura a lato è riportata la piedinatura e nella
sottostante tabella la descrizione delle funzioni dei pin.
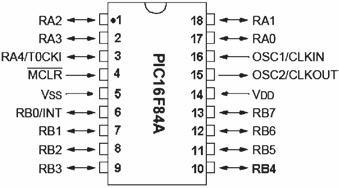
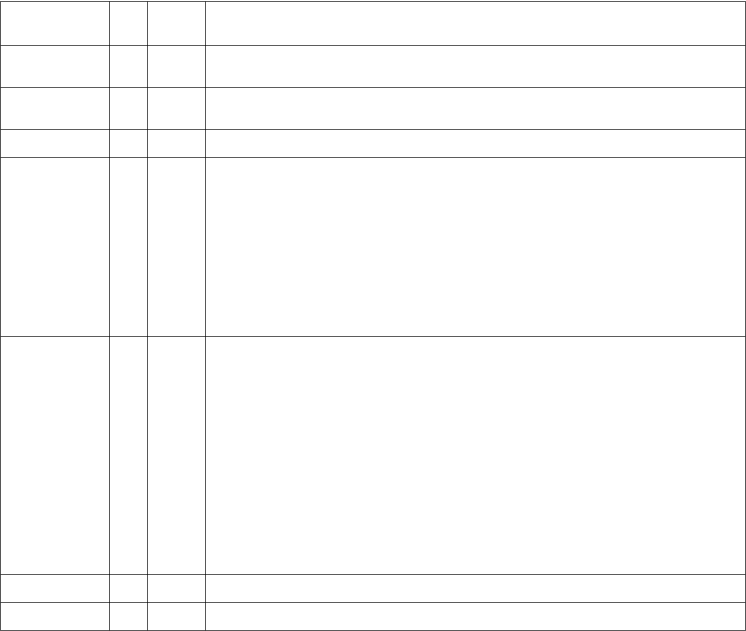
Descrizione della funzione dei pin del PIC16F84A


Nome Pin
Pin
Type
I/O/P
Descrizione
OSC1/CLKIN
16
I
Può essere collegato a un circuito esterno (quarzo o rete RC) o essere
utilizzato per ricevere un segnale da un oscillatore esterno (CLKIN)
OSC2/CLKOUT
15
o
Può essere collegato a un circuito esterno (quarzo o rete RC) o essere
utilizzato per generare all’esterno il clock interno
MCLR
4
I/P
Master clear per un reset hardware del micro
RA0
RA1
RA2
RA3
RA4/T0CKI
17
18
1
2
3
I/O
I/O
I/O
I/O
I/O
Porta bidirezionale a 5 bit
Può essere utilizzato come bit di I/O del Port A o come ingresso per il
registro TMR0
Port B bidirezionale a 8 bit
Può essere programmato per un weak pull-up interno su tutti gli ingressi
Svolge la doppia funzione: pin di I/O e interrupt dall’esterno
RB0/INT
RB1
RB2
RB3
RB4
RB5
RB6
RB75
6
7
8
9
10
11
12
13
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I/O
Una commutazione del segnale può svolgere la funzione di interrupt
Una commutazione del segnale può svolgere la funzione di interrupt
Usato in programmazione come DATA
Una commutazione del segnale può svolgere la funzione di interrupt
Usato in programmazione come CLOCK
Vss
5
P
Massa
VDD
14
P
Alimentazione
L’organizzazione della memoria
La memoria è divisa in blocco programma e blocco dati, ciascuno con il proprio bus.
È possibile quindi accedere a ogni blocco durante lo stesso ciclo di clock.
La memoria dati è composta da:
•
una RAM di uso generale;
•
dai registri SFR (Special Function Registers) usati per
controllare le operazioni della CPU e i moduli periferici.
•
da una EEPROM da 64 byte non indirizzabile diret-
-tamente ma mappata in modo indiretto.
Il blocco codice (vedi figura a lato) è costituito da:
•
una RAM che funge da area stack;
•
una EEPROM per il programma.
Il PC, con dimensione da 13 bit, è in grado di indirizzare
un banco di memoria da 8 KB × 14 ma ne può gestire
solo le prime 1024 locazioni (da 000H a 03FFH).
Tutte le altre locazioni sono rimappate su quelle dista-
-nti 1 KB.
In pratica per le locazioni 000H, 400H, 800H, 1000H,
ecc. l’istruzione sarà sempre la stessa.
Tra tutte le locazioni di memoria, due sono particola-
-rmente importanti:
•
la locazione 0000H perché è la cella da cui ha inizio
l’esecuzione del programma o il microcontrollore
riparte dopo un reset;
•
la locazione 0004H perché da questa cella ha inizio
l’esecuzione della subroutine di servizio degli inter-
-rupt; se non viene utilizzata la modalità
interrupt, la locazione può essere usata
come una qualsiasi locazione di memoria
per il programma.
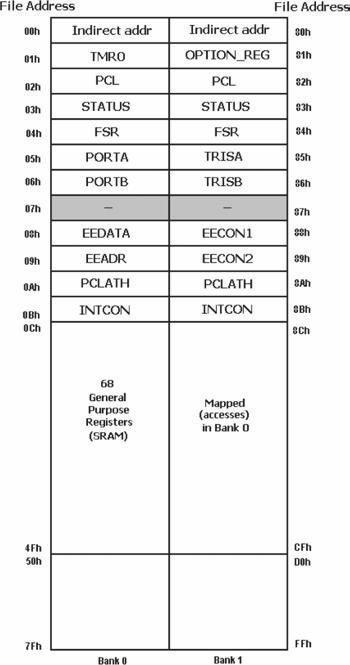
La memoria dati è composta di due parti:
•
SFR (Special Function Registers) che control-
-lano le periferiche;
•
GPR (General Purpose RAM).
La suddivisione della memoria in banchi richiede per la selezione del banco l’uso di
bit di controllo residenti nello STATUS register.
Nella figura a lato è illustrata la mappa della
memoria dati.
Con le istruzioni MOVWF e MOVF è possibile
trasferire i dati dall’accumulatore (W) alla RAM
(F) e viceversa.
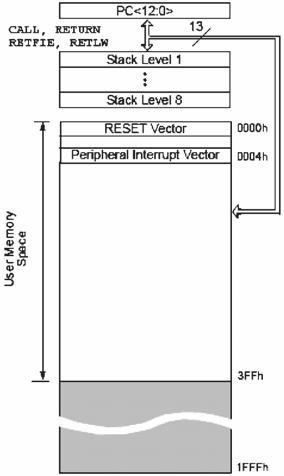
Mappa della memoria programmata
SFR (Special Function Registers)
Gli SFR sono utilizzati dalla CPU e dalle funzioni
periferiche per controllare il funzionamento del
dispositivo.
Gli SFR possono essere classificati in due tipi:
•
core
•
periferici.
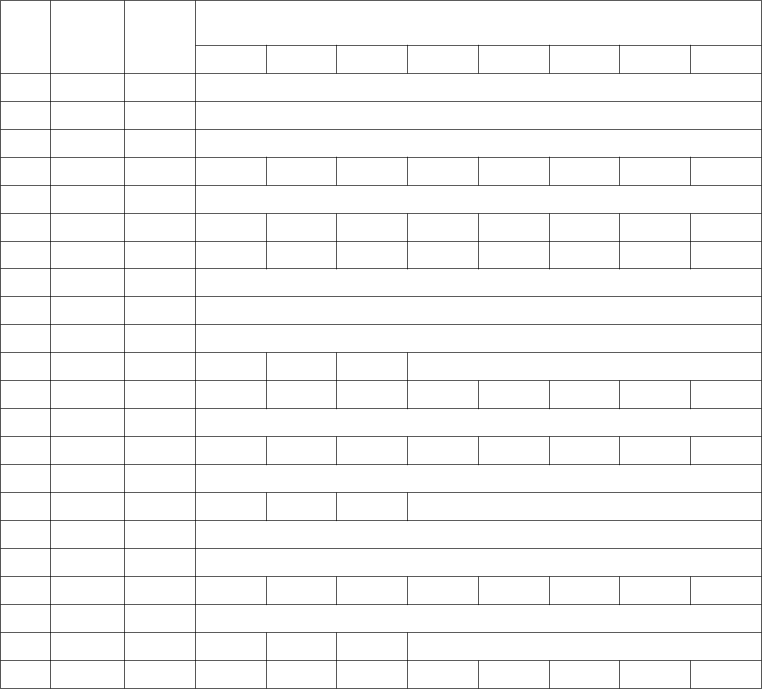
Nella sottostante tabella è riportata l’organiz-
-zazione dei registri SFR.
Organizzazione dei registri SFR.


Bank
Indirizzo
Simbolo
Bit dei registri
7
6
5
4
3
2
1
0
0
00h
INDF
Usa i contenuti di FSR per indirizzare la memoria dati (non è un registro fisico)
0
01h
TMR0
Clock/Counter da 8 bit in tempo reale
0
02h
PCL
8 bit di peso inferiore del PC
0
03h
STATUS
IRP
RP1
RP0
Z
DC
C
0
04h
FSR
Indirizzo indiretto della memoria dati del puntatore 0
0
05h
PORT A
--
--
--
T0CK1
RA3
RA2
RA1
RA0
0
06h
PORT B
RB7
RB6
RB5
RB4
RB3
RB2
RB1
RB0
0
07h
--
Locazione non implementata, letta come 0
0
08h
EEDATA
Registro per dati EEPROM
0
09h
EEADR
Registro per indirizzi EEPROM
0
0Ah
PCLATH
--
--
--
Buffer di scrittura per i 5 bit superiori del PC
0
0Bh
INTCON
GIE
EEIE
T0IE
INTE
RBIE
T0IF
INTF
RBIF
1
80h
PCL
8 bit di peso inferiore del PC
1
83h
STATUS
IRP
RP1
RP0
Z
DC
C
1
84h
FSR
Indirizzo indiretto della memoria dati del puntatore 0
1
85h
TRIS A
--
--
--
Registro direzione dati del PORT A
1
86h
TRIS B
Registro direzione dati del PORT B
1
87h
Locazione non implementata, letta come 0
1
88h
EECON1
--
--
--
EEIF
WRERR
WREN
WR
RD
1
89h
EECON2
Registro 2 di controllo della EEPROM (non è un registro fisico)
1
0Ah
PCLATH
--
--
--
Buffer di scrittura per i 5 bit superiori del PC
1
0Bh
INTCON
GIE
EEIE
T0IE
INTE
RBE
T0IF
INTF
RBIF


L’accumulatore
Il microcontrollore è dotato anche di un registro (a 8 bit), non presente nei due banchi di
memoria perché è alla CPU, chiamato Work Register.
È identificato in alcune istruzioni come registro W.
Questo registro svolge le funzioni di accumulatore ed è anche utilizzato per svolgere varie e
altre funzioni.
Il PC (Program Counter)
Il Program Counter è un registro a 13 bit implementato in due coppie di registri del
register file:
•
registri PCL presenti nel Bank 0 all’indirizzo 02H e nel Bank 1 all’indirizzo 82H, questi
registri contengono la parte bassa del PC, ovvero i bit da 0 a 7;
•
registri PCLATH presenti nel Bank 0 all’indirizzo 0AH e nel Bank 1 all’indirizzo 8AH, questi
registri contengono i 5 bit di peso superiore, ovvero da 8 a 12.
Status Register
I registri Status hanno un formato da 8 bit e si trovano nel Bank 0 all’indirizzo 03H e nel
Bank 1 all’indirizzo 83H.
I bit dello Status servono come controllo delle operazioni aritmetiche, logiche e di alcune
istruzioni speciali.
Questi contengono i bit:
• dei risultati delle operazioni aritmetiche della ALU;
• del bit di selezione del banco della memoria dati;
• del bit dello stato di reset.
Nella sottostante tabella sono riportate le funzioni svolte dai bit del registro.
Come ogni registro, lo Status può essere il registro destinazione di qualunque istruzione.
Non tutte le istruzioni, aventi come destinazione lo Status, sono in grado di cambiare i bit.
Come indicato in tabella solo le istruzioni aritmetiche possono far variare il livello dei
bit Z, C e DC.
Per esempio dopo l’istruzione CLRF cambiano soltanto alcuni bit, infatti la situazione
dello Status diventa successivamente 000uu1uu (u = non cambiato).
Alcune istruzioni quali ad esempio BCF, BSF, SWAPF e MOVWF non cambiano nessun bit
dello Status (vedi tabella delle istruzioni).
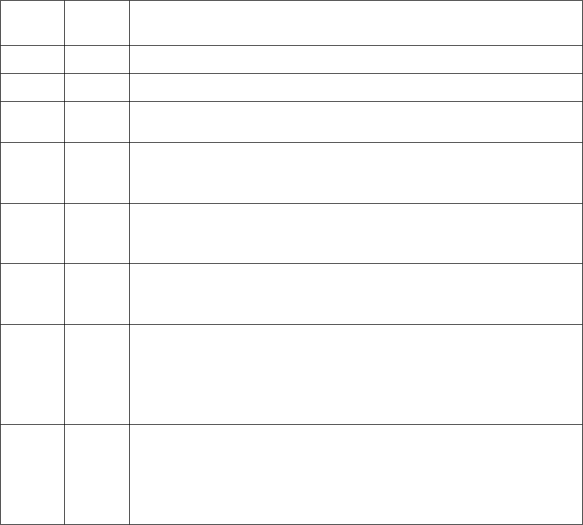
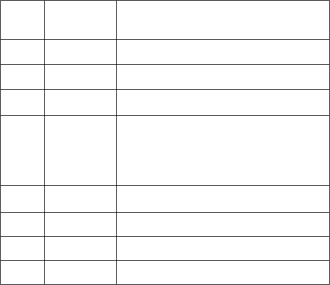
Descrizione della funzione dei pin dello Status Register


Bit
Symbol
Function
7
IRP
Non utilizzato nel PIC16F84, rimane sempre a 0
6
RP1
Non utilizzato nel PIC16F84, rimane sempre a 0
5
RP0
RP0 = 0 seleziona il Bank 0
RP0 = 1 seleziona il Bank 1
4
Time Out
1 = dopo accensione, durante l’istruzione di CLRDT o SLEEP
0 = durante il time out del WDT
3
Power-down
1 = dopo l’accensione o l’operazione di CLRWDT
0 = dopo il passaggio in stand.by
2
Z
Zero
1 = se il risultato è 0
0 = se il risultato non è 0
1
DC
Digital Carry
Riporto/prestito nelle operazioni di somme (ADDLW e ADDWF)
e sottrazioni (SUBWF e SUBLW)
1 = riporto dal quarto bit
0 = nessun riporto
0
C
Carry
Riporto/prestito nelle operazioni di somme (ADDLW e ADDWF)
e sottrazioni (SUBWF e SUBLW)
1 = riporto dal bit più significativo
0 = nessun riporto
Option register
L’Option register presente nel Bank 1 all’indirizzo 81H serve a selezionare e abilitare
le funzioni del micro.
La descrizione delle funzioni svolte dai bit di questo registro sono riportate nelle due
sottostanti tabelle.
Descrizione dei bit dell’OPTION_REG.


Bit
Symbol
Description
7
RPBU
Bit di abilitazione dei pull-up del PORTB
1 = abilita
0 = disabilita
6
INTED
G
Bit di selezione del fronte di interrupt RB0/INT
1 = interrupt sul fronte di salita del pin RB0/INT
0 = interrupt sul fronte di discesa del pin RB0/INT
5
T0CS
Bit di selezione della sorgente del clock per TMR0
1 = abilita la sorgente di clock esterno su
RA4/T0CKI
0 = abilita la sorgente di clock interno
4
T0SE
Bit di selezione del fronte di commutazione del
segnale su RA4/
T0CKI
1 = commuta sulla transizione 1>0
0 = commuta sulla transizione 0>1
3
PSA
Assegna la gestione del prescaler
1 = prescaler assegnato a WDT
0 = prescaler assegnato TMR0
2
PS2
Bit he definicono il rapporto di prescaler
1
PS1
0
PS0
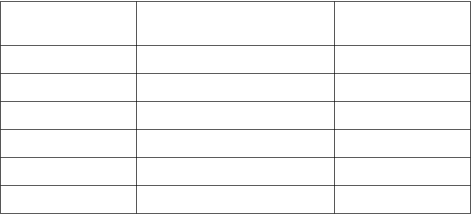
Descrizione dei rapporti di Prescaler


PS2
PS1
PS0
TMR0
WDT
0
0
0
1:2
1:1
0
0
1
1:4
1:2
0
1
0
1:8
1:4
0
1
1
1:16
1:8
1
0
0
1:32
1:16
1
0
1
1:64
1:32
1
1
0
1:128
1:64
1
1
1
1:256
1:128
Registri della EEPROM dati
La EEPROM dati non è indirizzabile direttamente ma è accessibile in modo indiretto
tramite i registri EEDATA e EEADR.
Il registro EEDATA, localizzato nel Bank 0 all’indirizzo 08H, è utilizzato dal micro per
contenere il dato letto dalla EEPROM ovvero per trasferire il dato nella EEPROM.
Il registro EEADR, situato nel Bank 0 all’indirizzo 09H, serve a memorizzare l’indirizzo della
EEPROM dove eseguire l’operazione di lettura o scrittura.
Tale registro pur avendo un formato da 8 bit e quindi potendo gestire una memoria da
256 byte, indirizza solo 64 byte poiché la restante parte della memoria non è disponibile in
questa versione di micro.
I registri EECON1 e EECON2, situati nel Bank 1 agli indirizzi rispettivamente 88H e 89H,
servono per controllare e avere informazioni sulle operazioni di lettura e scrittura nella
EEPROM.
Nella sottostante tabella sono illustrate le funzioni svolte dai pin del registro EECON1.
Il registro EECON2 funge da appoggio al registro EECON1 in fase di scrittura.
Infatti per scrivere un byte nella EEPROM dati è necessario preliminarmente scrivere in
sequenza 2 determinati valori (55H e AAH) in EECON2 e successivamente abilitare il
segnale di scrittura in EECON1.
Per l’operazione di lettura non è necessario il registro di appoggio EECON2.
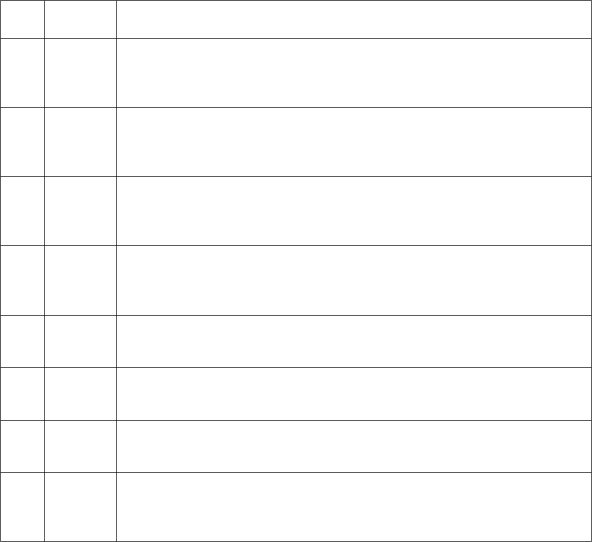
Descrizione dei pin per la configurazione del registro EECON1.


Bit
Sym-
bol
Descrizione
7
--
Non implementato, letto come 0
6
--
Non implementato, letto come 0
5
--
Non implementato, letto come 0
4
EEIF
Flag di interrupt che segnala la fine dell’operazione di scrittura nella EEPROM
1 = fine scrittura
0 = scrittura non completata o non è iniziata
3
WRER
R
Flag di segnalazione di errore nella scrittura della EEPROM
1 = operazione di scrittura interrotto causa errore
0 = operazione di scrittura completato
2
WREN
Bit di abilitazione alla scrittura nella EEPROM
1 = abilitazione alla scrittura
0 = disabilitata la scrittura
1
WR
Bit di controllo del ciclo scrittura
1 = inizia il ciclo di scrittura
Il bit è azzerato via hardware una volta completata la scrittura deve essere settato via
software
0 = il ciclo di scrittura nella EEPROM è completato
0
RD
Bit di controllo del ciclo di lettura nella EEPROM
1 = inizia il ciclo di lettura, a fine operazione viene posto a 0 via hardware
Via software il bit può essere solo settato
0 = non inizia il ciclo di lettura
Esempio
Sequenza richiesta per l’inizio della scrittura nella EEPROM dati.
BSF STATUS, RP0
;Bank1
BCF INTCON, GIE
;disabilita interrupt
BSF EECON1, WREN
;abilita scrittura
MOVLW 55h ;
MOVWF EECON2
;scrive 55h
MOVLW AAh ;
MOVWF EECON2
;scrive AAh
BSF EECON1, WR
;setta il bit WR
;inizio scrittura
BSF INTCON, GIE
;abilita interrupt
Interrupt e INTCONT_REG
Nel PIC16F84 gli interrupt possono essere generati internamente o esternamente.
Gli interrupt possono essere generati da un dispositivo esterno:
• sul pin RB0/INT sul fronte di salita o su quello di discesa;
• quando vi è un cambiamento del segnale sui pin RB7-RB4.
Gli interrupt possono essere generati internamente:
•
da TMR0 al termine del conteggio;
•
al termine di un’operazione di scrittura nella EEPROM dati;
•
quando si verifica l’evento di wake-up from sleep ovvero quando il micro esce dallo
stato di power mode e diventa nuovamente operativo.
Il registro INTCONT, situato nel Bank 0 all’indirizzo 0BH e nel Bank 1 all’indirizzo 8BH,
serve per controllare e abilitare o disabilitare gli interrupt.
Nella sottostante tabella è riportato lo schema e la descrizione delle funzioni dei pin
di questo registro
Descrizione dei pin per la configurazione del registro INTCON1.


Bit
Symbol
Descrizione
7
GIE
Bit di abilitazione di tutti gli interrupt
6
EEIE
Bit di abilitazione dell’interrupt dopo la scrittura completa nella EEPROM
1 = abilita interrupt
0 = disabilita l’interrupt
5
T0IE
Bit di abilitazione dell’interrupt quando TMR0 va in overflow
1 = abilita l’interrupt
0 = disabilita l’interrupt
4
INTE
Bit di abilitazione dell’interrupt esterno RB0INT
1 = abilita l’interrupt
0 = disabilita l’interrupt
3
RBIE
Bit di abilitazione dell’interrupt quando un segnale del port RB cambia di stato
1 = abilita l’interrupt
0 = disabilita l’interrupt
2
T0IF
Bit di flag per rilevare l’overflow di TMR0
1 = TMR0 in overflow
0 = TMR0 non in overflow
1
INTF
Bit di flag dell’interrupt sul pin RB0/INT
1 = si è verificato un interrupt
0 = non si è verificato un interrupt
0
RBIF
Bit di flag che rileva l’interrupt causato da un cambiamento di un bit del Port RB
1 = si è verificato l’interrupt
0 = non si è verificato l’interrupt
Timer0 e Prescaler
Il modulo Timer0, che può fungere sia da timer sia da contatore, ha le seguenti proprietà:
• ha un formato da 8 bit;
• è scrivibile e leggibile;
• è possibile selezionare il clock interno e esterno;
• è possibile selezionare il fronte attivo del clock esterno;
• il prescaler a 8 bit è programmabile via software;
• l’interrupt per overflow da FFh a 00h
Per programmare il Timer0 come timer è necessario azzerare T0CS (OPTION_REG<5>).
È possibile leggere, tramite l’accumulatore W, il valore del Timer0 nel registro TMR0 prese-
-nte nel Bank 0 all’indirizzo 01H.
Il contenuto del TMR0 può anche essere programmato con un valore che il controllore
incrementerà a ogni ciclo di clock.
L’incremento o il decremento del TMR0 può essere causato da un clock interno o da un
clock esterno sul pin RA4/T0CKI.
Se in TMR0 si imposta un valore minore di 255, quando giunge alla fine del conteggio
(255), con il successivo impulso di clock (255+1), riparte con il conteggio da 0 e non
dal valore impostato.
Quando il TMR0 va in overflow, viene settato il bit T0IF del registro INTCONT.
Eventualmente si può far generare un segnale di interrupt settando il bit T0IE dello stesso
registro.
La modalità di funzionamento come contatore si ottiene settando il bit T0CS (OPTION_
REG<5>).
Nel modo contatore Timer0 sarà incrementato ogni volta che si avrà un fronte di salita o
discesa del segnale sul pin RA4/T0CKI.
Il fronte attivo del clock è ottenuto programmando il bit T0SE (OPTION_REG<4>).
Il micro dispone di un contatore programmabile a 8 bit che funge da divisore di frequenza
e svolge le seguenti funzioni:
• prescaler per il timer di sistema (Timer0);
• postscaler per il WatchDog.
Il circuito di prescaler è unico per il Timer0 e il WatchDog e quindi con il bit PSA (OPTION_
REG<3>) è selezionabile per l’uno o per l’altro.
Con i bit PS2-PS0 (OPTION_ REG<2:0>) si può selezionare il rapporto di prescaler.
Registri PORTA e TRISA
Il registro PORTA serve per leggere o scrivere un dato nella porta relativa.
Il PORTA è situato nel Bank 0 all’indirizzo 05h.
Il PORTA è un registro a 8 bit ma solo i primi
4 bit sono significativi.
Nella tabella a lato è riportata la descrizione
della funzione svolta dai pin.
Registro PORTA.


Bit
Symbol
Description
7
---
Non implementato, sempre a 0
6
---
Non implementato, sempre a 0
5
---
Non implementato, sempre a 0
4
RA4/T0CKI
Input di tipo TTL, uscita di tipo
open drain
Ingresso di clock esterno per
TMR0
3
RA3
I/O
2
RA2
I/O
1
RA1
I/O
0
RA0
I/O
Il registro TRISA, analogamente al PORTA,
è a 8 bit e solo i primi 4 sono significativi.
Si trova nel Bank 1 all’indirizzo 85H.
Questo registro serve per programmare quali
pin del PORTA devono essere di uscita e quali
di ingresso.
La scrittura nel TRISA non è diretta ma
avviene tramite il registro W (accumulatore).
Ponendo un bit del TRISA a 1 il corrispondente
pin del PORTA è programmato come bit
d’ingresso, se invece si mette a 0 il bit di
TRISA il bit corrispondente del PORTA è selezionato come bit di uscita.
Ad esempio se TRISA<1> = 1 allora PORTA<1> = ingresso.
Se TRISA<2> = 0 si ha PORTA<2> = uscita
Esempio
Programma di inizializzazione del PORTA.
BCF STATUS, RP0
;
CLRF PORTA
;Inizializza PORTA cancellando i dati in uscita
BSF STATUS, RP0
;seleziona Bank 1
MOVLW 0x0F
;valore usato per la direzione dati iniziale
MOVWF TRISA
;setta i bit RA<3:0> come ingressi ;RA4 come uscita TRISA<7:5>
;sono letti sempre come 0
Registri PORTB e TRISB
Il registro PORTB serve per leggere o scrivere un dato nella porta relativa.
Il PORTB è situato nel Bank 0 all’indirizzo 06h.
Il PORTB è un registro a 8 bit.
La descrizione delle funzioni svolte dai pin è riportata nella sottostante tabella:
Descrizione della funzione dei pin del PORTB


Bit
Symbol
Description
7
RB7
Ingresso TTL, uscita open drain
ingresso se TRISB7 = 1
ingresso interrupt, abilitato se RBIE = 1
weak pull-up programmabile internamente via software se RBPU = 0
6
RB6
Ingresso TTL, uscita open drain
ingresso se TRISB6 = 1
ingresso interrupt, abilitato se RBIE = 1
weak pull-up programmabile internamente via software se RBPU = 0
5
RB5
Ingresso TTL, uscita open drain
ingresso se TRISB5 = 1
ingresso interrupt, abilitato se RBIE = 1
weak pull-up programmabile internamente via software se RBPU = 0
4
RB4
Ingresso TTL, uscita open drain
ingresso se TRISB4 = 1
ingresso interrupt, abilitato se RBIE = 1
weak pull-up programmabile internamente via software se RBPU = 0
3
RB3
Ingresso TTL, uscita open drain
ingresso se TRISB3 = 1
weak pull-up programmabile internamente via software se RBPU = 0
2
RB2
Ingresso TTL, uscita open drain
ingresso se TRISB2 = 1
weak pull-up programmabile internamente via software se RBPU = 0
1
RB1
Ingresso TTL, uscita open drain
ingresso se TRISB1 = 1
weak pull-up programmabile internamente via software se RBPU = 0
0
RB0/INT
Ingresso TTL, uscita open drain
ingresso se TRISB0 = 1
ingresso interrupt se INTE = 1
weak pull-up programmabile internamente via software se RBPU = 0
Il registro TRISB, analogamente al PORTB, è a 8 bit.
Si trova nel Bank 1 all’indirizzo 86h.
Questo registro serve per programmare quali pin del PORTB devono essere di uscita e
quali di ingresso.
La scrittura nel TRISB è indiretta poiché passa attraverso l’accumulatore W.
Ponendo un bit del TRISB a 1 il corrispondente pin del PORTB è programmato come bit
d’ingresso, se invece si mette a 0 il bit di TRISB, il bit corrispondente del PORTB è
selezionato come bit di uscita.
Ad esempio se TRISB<1> = 1 allora PORTB<1> = ingresso.
Se TRISB<2> = 0 si ha PORTB<2> = uscita
Esempio
Programma di inizializzazione del PORTB.
BC STATUS, RP0
;
CLRF PORTB
;inizializza PORTB cancellando i dati in uscita
BSF STATUS, RP0
;seleziona Bank 1
MOVLW 0xCF
;valore usato per la direzione dati iniziale
MOVWF TRISB
;setta i bit RB<3:0> come ingressi
;RB<5:4> come uscite
;RB<7:6> come ingressi
Configurazione della CPU
Prima di iniziare l’elaborazione del programma utente è necessario configurare la CPU
inviando una configuration word da 14 bit.
La word di configurazione deve essere inviata alla CPU alla memoria codice all’indirizzo
2007h e deve essere ripetuta ogniqualvolta si esegue un aggiornamento del codice.
Nella sottostante tabella è riportato lo schema della configuration word.
Schema della configuration word.


Bit
Symbol
Description
13
CP = Code Protection
CP=1 codice non protetto
CP=0 Codice protetto
12
11
10
9
8
7
6
5
4
3
PWRTE
Power-up Timer Enable
PWRTE=1 Disabilitato
PWRTE=0 Abilitato
2
WDTE
WatchDog Timer Enable
WDTE=1 Abilitato
WDTE=0 Disabilitato
1
FOSC0
Oscillator Selection
0
FOSC1
Con CP = 0 il codice del programma è protetto da lettura; la EEPROM programma
risponde alla richiesta con 7Fh.
In questo caso si dice che il micro è OTP, programmabile una sola volta.
Si tratta di una modalità operativa utilizzata quando il codice non deve essere più
soggetto a modifiche.
La funzione svolta da bit PWRTE consiste nel tenere azzerata oppure no la CPU all’acce-
-nsione per un tempo di 72 ms in modo tale da consentire alla tensione di alimentazione
di raggiungere il valore standard.
Con PWRTE =1 la funzione è disabilitata, con PWRTE =0 la funzione è abilitata.
Il bit WDTE = 1 abilita la funzione di timer del watchdog; un livello 0 la disabilita.
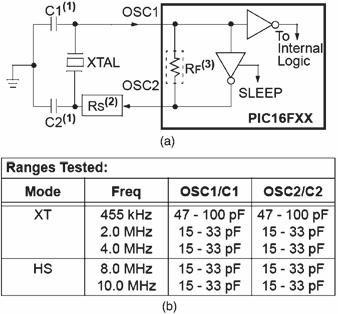
I bit F0SC0 e F0SC1 selezionano la tipologia circuitale dell’oscillatore:
• 00 = LP, oscillatore con cristallo a bassa potenza;
• 01 = XT, oscillatore al quarzo;
• 10 = HS, oscillatore al quarzo ad alta velocità;
• 11 = RC, oscillatore con componenti RC.
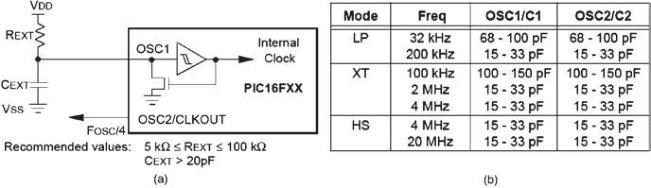
Nella figura (a) a lato è illustrato lo schema
circuitale che il costruttore suggerisce di adottare
per l’oscillatore al quarzo o con cristallo e in
figura (b) le relative frequenze con in valori
dei componenti.
Nella sottostante figura (a) è riportato invece lo
schema dell’oscillatore con componenti RC e
ella stessa figura (b) le relative frequenze con
i valori dei componenti
Set di istruzioni
Le istruzioni del PIC16F84 sono classificabili in tre tipologie:
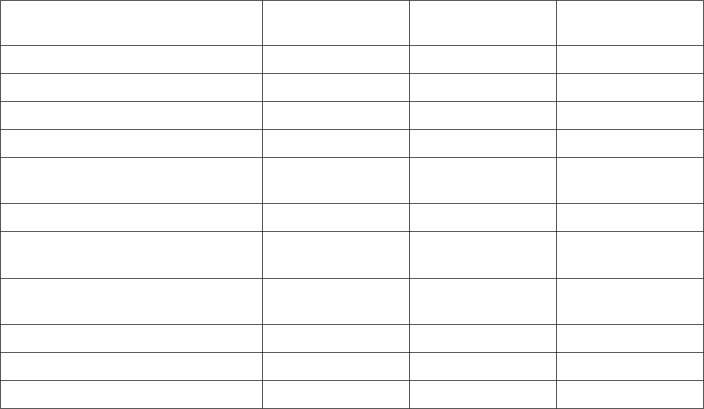
• istruzioni orientate al bit (tipo b);
• istruzioni orientate al byte (tipo B);
• istruzioni di controllo.
Ogni istruzione è eseguita in un ciclo macchina (4 cicli di clock) con l’eccezione delle
istruzioni di salto che necessitano di due cicli macchina.
Nelle sottostanti tabelle sono sintetizzate le istruzioni con una relativa breve descrizione.
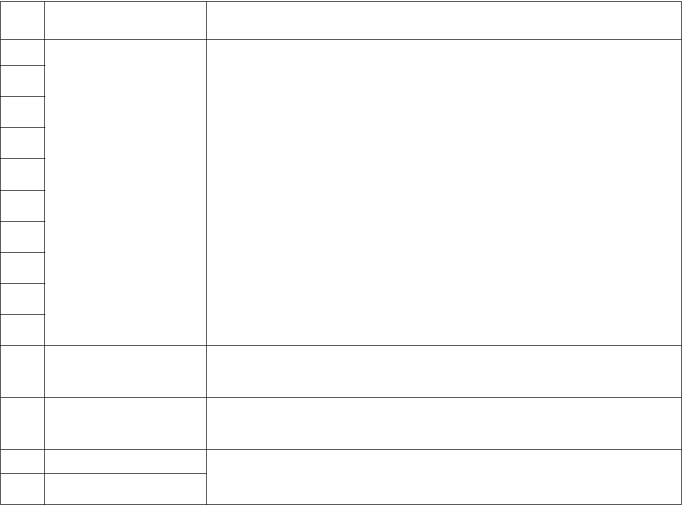
Sintesi del set delle istruzioni.

Istruzione
Tipo
Status
Significato
Descrizione
Mnemonica
Parametro
ADDLW
K
(0<K<255)
B
C,DC,Z
Add Literal
and W
Somma la costante K al contenuto di W e pone
il risultato in W
ADDWF
f, d
B
C,DC,Z
Add W and f
Somma il contenuto di W e f:
se d = 1 risultato in f
se d = 0 risultato in W
ANDLW
K
(0<K<255)
B
Z
AND Literal
with W
Operazione AND tra contenuto di W e costante
K, risultato in W
ANDWF
f, d
B
Z
AND W with f
Operazione AND tra contenuto di W e di f:
se d = 1 risultato in f
se d = 0 risultato in W
BCF
f, b
b
Bit Clear f
Pone a 0 il bit b-esimo del registro f
BSF
f, b
b
Bit set f
Pone a 1 il bit b-esimo del registro f
BTFSC
f, b
c
Bit Test,
Skip if Clear
Test del bit b-esimo del registro f:
se b = 1 passa all’istruzione successiva
se b = 0 salta l’istruzione successiva con un
NOP
BTFSS
f, b
c
Bit Test,
Skip if Set
Test del bit b-esimo del registro f:
se b = 0 passa all’istruzione successiva
se b = 1 salta l’istruzione successiva con un
NOP
CALL
K
(0<K<2047)
c
Clear f
Resetta tutti i bit del registro f
CLRF
f
(0<f<2047)
B
Z
Clear f
Resetta tutti i bit del registro f
CLRW
B
Z
Clear W
Resetta 0 tutti i bit del’accumulatore W
CLRWDT
B
TO
PD
Clear
Watchdog
Timer
Resetta tutti i bit del WDT
COMF
f,d
0 ≤ f ≤ 127
dε[0,1]
B
Z
Complement f
Complementa il registro f:
con d = 0 risultato in W
con d = 1 risultato in f
DECF
f,d
0 ≤ f ≤ 127
dε[0,1]
B
Z
Decrement f
Decrementa il registro f:
con d = 0 risultato in W
con d = 1 risultato in f
DECFSZ
f,d
0 ≤ f ≤ 127
dε[0,1]
B/c
Decrement f,
Skip if 0
Decrementa il registro f:
con d = 0 risultato in W
con d = 1 risultato in f
ma se f = 0 salta l’istruzione
GOTO
K
0 ≤ K ≤
2047
c
Go To
Salto incondizionato alla locazione di
memoria programma K
INCF
f,d
0 ≤ f ≤ 127
dε[0,1]
B
Z
Increment f
Incrementa il registro f:
con d = 0 risultato in W
con d = 1 risultato in f
INCFSZ
f,d
0 ≤ f ≤ 127
dε[0,1]
B/c
Z
Increment f,
Skip if 0
Incrementa il registro f:
con d = 0 risultato in W
con d = 1 risultato in f
ma se f = 0 salta l’istruzione
IORLW
K
0 ≤ f ≤ 255
B
Z
Inclusive OR
Literal with W
Operazione OR tra la costante k e il contenuto
di W, risultato in W
IORWF
f,d
0 ≤ f ≤ 127
dε[0,1]
B
Z
Inclusive OR
E
with f
Operazione OR tra contenuto di W e contenuto
di f:
con d = 0 risultato in W
con d = 1 risultato in f
MOVF
f,d
0 ≤ f ≤ 127
dε[0,1]
B
Z
Move f
Con d = 0 contenuto di f in W
Con d = 1 contenuto di f in f (debug)
MOVLW
K
0 ≤ f ≤ 255
B
Move Literal
to W
Pone in W la costante K
MOVWF
f,d
0 ≤ f ≤ 127
B
Move W to f
Trasferisce il contenuto di W in f
NOP
No Operation
Nessuna operazione
RETFIE
c
Return from
Interrupt
Servita la subroutine di servizio dell’interrupt
torna al punto in cui aveva interrotto il main
RETLW
K
c
Return with
Literal W
Servita la subroutine di servizio dell’interrupt
torna al punto in cui aveva interrotto il main
Pone in W la costante K
RETURN
c
Return from
subroutine
Servita la subroutine torna al punto in cui
aveva interrotto il main
RLF
f,d
0 ≤ f ≤ 127
dε[0,1]
B
C
Rotate Left
through Carry
Shifta a sinistra i bit del registro f. Il bit nel
flag C dello STATUS viene posto nella posizione
0 del risultato, il bit 7 viene posto in C:
Con d = 0 risultato in W
Con d = 1 risultato in f
RRF
f,d
0 ≤ f ≤ 127
dε[0,1]
B
C
Rotate Right
through Carry
Shifta a destra i bit del registro f. Il bit C dello
STATUS viene posto nella posizione 0 del
risultato, il bit 7 viene posto in C:
Con d = 0 risultato in W
Con d = 1 risultato in f
SLEEP
c
TO
PD
Sleep
CPU in standby
Da questo stato la CPU esce con un interrupt
Ma non da timer interno o con un reset
dall’esterno
SUBLW
K
B
C,DC,Z
Subtract
Literal
from W
Sottrae dal contenuto di W la costante K e il
risultato in W.
SUBWF
f,d
0 ≤ f ≤ 127
dε[0,1]
B
C,DC,Z
Subtract W
from f
Sottrae dal contenuto di W il contenuto di f:
con d = 0 risultato in W
con d = 1 risultato in f
SWAPF
f,d
0 ≤ f ≤ 127
dε[0,1]
B
Swap Nibbles
in f
Scambia la parte alta con quella bassa del
registro f:
con d = 0 risultato in W
con d = 1 risultato in f
XORLW
K
0 ≤ f ≤ 255
B
Z
Exclusive OR
Literal with W
Operazione XOR tra K e contenuto di W,
risultato in W
XORWF
f,d
0 ≤ f ≤ 127
dε[0,1
B
Z
Exclusive OR
Literal with f
Operazione XOR tra contenuto di W e di f:
con d = 0 risultato in W
con d = 1 risultato in f
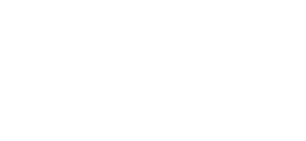
Istruzioni booleane


Mnemonic
Operation
Execution Time
(ms)
ANL C, bit
C=C and bit
2
ANL C, /bit
C=C and not bit
2
OR C,bit
C= C or bit
2
OR C, /bit
C= C or not bit
2
MOV C, bit
C=bit
1
MOV bit, C
Bit=C
2
CLR C
C=0
1
CLR bit
Bit=0
1
SETB C
C=1
1
SETB bit
Bit=1
1
CPL C
C=not C
1
CPL bit
Bit=not bit
1
JC rel
Se C=1 salta
2
JNC rel
Se C=0 salta
2
JB bit, rel
Se bit=1 salta
2
JNB bit, rel
Se bit=0 salta
2
JBC bit, rel
Se bit=0 salta e poni bit=0
2
Linguaggi di programmazione
Il linguaggio di programmazione dei microcontrollori, come quelli dei microprocessori, è
un linguaggio Assembler.
Prima di essere installato in un micro il programma in Assembler deve essere compilato.
La compilazione consiste nel tradurre il programma scritto in linguaggio Assembler, ovvero
in un codice mnemonico, in un linguaggio macchina, una sequenza di bit 0 e 1.
I programmi in linguaggio Assembler hanno estensione «.asm».
Tuttavia anche la programmazione in Assembler è meno agevole rispetto alla program-
-mazione con linguaggi ad alto livello poiché il linguaggio di basso livello è strettamente
legato al tipo di micro o comunque alla famiglia di micro.
Risulta pertanto più agevole la programmazione con linguaggio ad alto livello che, essendo
svincolata dal micro, è esportabile su altri dispositivi.
In questo caso sono necessari compilatori in grado di tradurre il programma scritto con
linguaggi ad alto livello in linguaggio macchina.
I linguaggi ad alto livello più diffusi sono Basic, C e Pascal.
Sono disponibili oggi oltre ai compilatori professionali anche quelli di tipo open source.
Per rendere più agevole il compito del progettista, la MICROCHIP, produttrice dei micro PIC,
distribuisce gratuitamente un sistema di sviluppo integrato IDE (Integrated Development
Environment) chiamato MPLAB.
Un sistema integrato di sviluppo consente la scrittura, il debug e la simulazione del
programma da installare nel micro. MPLAB è una suite per Windows che comprende un
ambiente di sviluppo grafico, assembler e debugger.
MPLAB non è però un compilatore.
Il compilatore a volte è fornito anche gratuitamente dall’azienda che produce il program-
-matore.
Il programmatore è un circuito che serve per eseguire il trasferimento del file eseguibile
nel PIC.
Il programmatore e il relativo software costituisce l’interfaccia tra il PC e la scheda su
cui è residente il PIC.
La porta di comunicazione del PC è normalmente la seriale RS232.
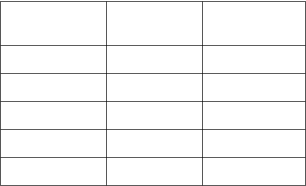
La sottostante tabella evidenzia le differenti prestazioni del PIC16F84A rispetto a quelle dei
modelli superiori 16F628 e 16F819.
Caratteristiche differenti dei modelli 16F84A, 16F628 e 16F819


Caratteristiche
PIC 16F84A
PIC 16F628
PIC 16F819
Linee I/O
13
16
16
Mem. FLASH (programma)
1 Kilobyte
2 Kilobyte
2 Kilobyte
Mem. RAM (dati volat.)
68 byte
224 byte
256 byte
Mem. EEPROM (dati non volat.)
64 byte
128 byte
256 byte
Timer
1 (a 8 bit)
2 (a 8 bit)
1 (a 16 bit)
2 (a 8 bit)
1 (a 16 bit)
Comparatori analogici
No
2
1
Funzione Capture
(misura intervalli di tempo)
No
Si
Si
Funzione Compare
(confronto conteggio)
No
Si
Si
Uscita PWM
No
Si (risoluz. 10bit)
Si (risoluz. 10bit)
Convertitore A/D
No
No
5 canali da 10bit
Porta Seriale
No
Si
Si

Lorem Ipsum Dolor
Cupidatat excepteur ea dolore sed in adipisicing id? Nulla lorem deserunt aliquip officia reprehenderit fugiat, dolor excepteur in et officia ex sunt ut, nulla consequat. Laboris, lorem excepteur qui labore magna enim ipsum adipisicing ut. Sint in veniam minim dolore consectetur enim deserunt mollit deserunt ullamco. Mollit aliqua enim pariatur excepteur. Labore nulla sunt, in, excepteur reprehenderit lorem fugiat. Ipsum velit sunt! Non veniam ullamco amet officia ut, ex mollit excepteur exercitation fugiat eu ut esse cupidatat in velit. Non eu ullamco in pariatur nisi voluptate mollit quis sed voluptate ea amet proident dolore elit. Occaecat nostrud dolore sunt, ullamco eu ad minim excepteur minim fugiat. Nostrud culpa eiusmod dolor tempor et qui mollit deserunt irure ex tempor ut dolore. Dolore, nostrud duis ad. In nulla dolore incididunt, sit, labore culpa officia consectetur mollit cupidatat exercitation eu. Aute incididunt ullamco nisi ut lorem mollit dolore, enim reprehenderit est laborum ut et elit culpa nulla. Excepteur fugiat, laboris est dolore elit. In velit lorem id, et, voluptate incididunt ut ad in sunt fugiat, esse lorem. Nisi dolore ea officia amet cillum officia incididunt magna nisi minim do fugiat ut nostrud dolore Qui in est in adipisicing ea fugiat aliqua. Reprehenderit excepteur laboris pariatur officia sit amet culpa aliquip quis elit eiusmod minim. Sint ut ut, proident in mollit do qui eu. Pariatur et cupidatat esse in incididunt magna amet sint sit ad, sunt cillum nulla sit, officia qui. Tempor, velit est cillum sit elit sed sint, sunt veniam.





© Irure ut pariatur ad ea in ut in et. In incididunt sed tempor

